



- 電工電子電氣實訓設備
- 電力電子電機實訓裝置
- 過程控制實驗裝置
- 工業機器人智能制造
- 維修電工實訓設備
- PLC自動化實訓設備
- 數控機床實訓考核裝置
- 數控機床機械加工設備
- 機床電氣實訓裝置
- 機電一體化實訓設備
- 機械示教陳列柜
- 機械專業實驗設備
- 傳感器檢測實驗室設備
- 工業互聯人工智能實訓設備
- 特種作業操作實訓考核設備
- 物聯網實驗實訓設備
- 消防、給排水實訓設備
- 網絡布線實訓室設備
- 電梯安裝維修實訓考核設備
- 熱工暖通家電制冷實訓設備
- 樓宇智能化實訓設備
- 環境工程實驗裝置
- 流體力學實驗裝置
- 化工專業實驗實訓設備
- 新能源實驗實訓設備
- 電力供配電實訓設備
- 煤礦礦山實驗實訓設備
- 液壓氣動實驗室設備
- 教學仿真軟件
- 軌道交通實驗實訓設備
- 船舶實訓考核裝置
- 駕駛模擬訓練設備
- 新能源汽車實訓設備
- 汽車發動機底盤實訓臺
- 汽車電器電子實訓臺
- 特種車工程機械實訓設備
- 智能網聯汽車實訓設備
- 醫學教學模型
- 中小學實驗室設備
- 實驗箱.實驗儀
- 光電子通信實驗裝置
- 儀器設備.教學掛圖
- LGY-DQ08型 電氣及電機控制實訓考核裝置
- LG-JT交通安全駕駛模擬體驗設備
- 汽車燃料電池系統實訓臺
- LG-AI08型 人工智能綜合應用技術實訓考核系統
- LGN-D08型 單片機傳感器綜合實訓平臺
- LGDG-6型 電工綜合實驗實訓工作臺
- LGY-YQ09型 液壓與氣壓傳動綜合實驗實訓工作臺
- LGBX-WL01型網絡綜合布線實訓室
- LGJ-JD09型 機電一體化綜合實訓裝置
- LGBX-AI02型人工智能應用技術實訓室
- LGBX-AQ07型網絡安全運維與攻防演練綜合實訓室
- LGBX-AQ06型網絡安全攻防演練實訓室
- LGBX-X02型網絡信息安全運維實訓室
- LGBX-SJ03型數據中心網絡工程綜合實訓室
- LGBX-WL06型網絡系統管理與運維實訓室
- 汽車透明整車模型、運輸車輛模型
- CLG-104型《電機與變壓器》示教陳列柜(CD解說)
- CLG-109《模具》示教陳列柜(CD解說)
- CLG-107型 機械綜合陳列柜
- CLG-102型 《機械零件》示教陳列柜
- LG-DCC型 機械振打袋式除塵實驗裝置
- LG-MFL01型 超濾微濾膜分離實驗裝置
- LG-NKS型 催化劑顆粒內擴散實驗裝置
- LG-CLDF型 多釜串聯實驗裝置
- LG-YY18C型 氣動與PLC實訓裝置(T型鋁槽單面)
- LG-YY18B型 透明液壓傳動與PLC實訓裝置(T型鋁槽單面
- LG-YYCS01型 液壓傳動與控制綜合測試實驗臺
- LG-DY01B型 電液比例綜合實驗臺
- LG-YYZN01型 智能型液壓綜合實驗臺
- LG-DLK01型 電力系統綜合自動化實驗平臺
LGGY-DS13型具身復合機器人創新設計套裝實訓裝置(增強版)
品牌:理工偉業 咨詢電話:010-82827827 82827835
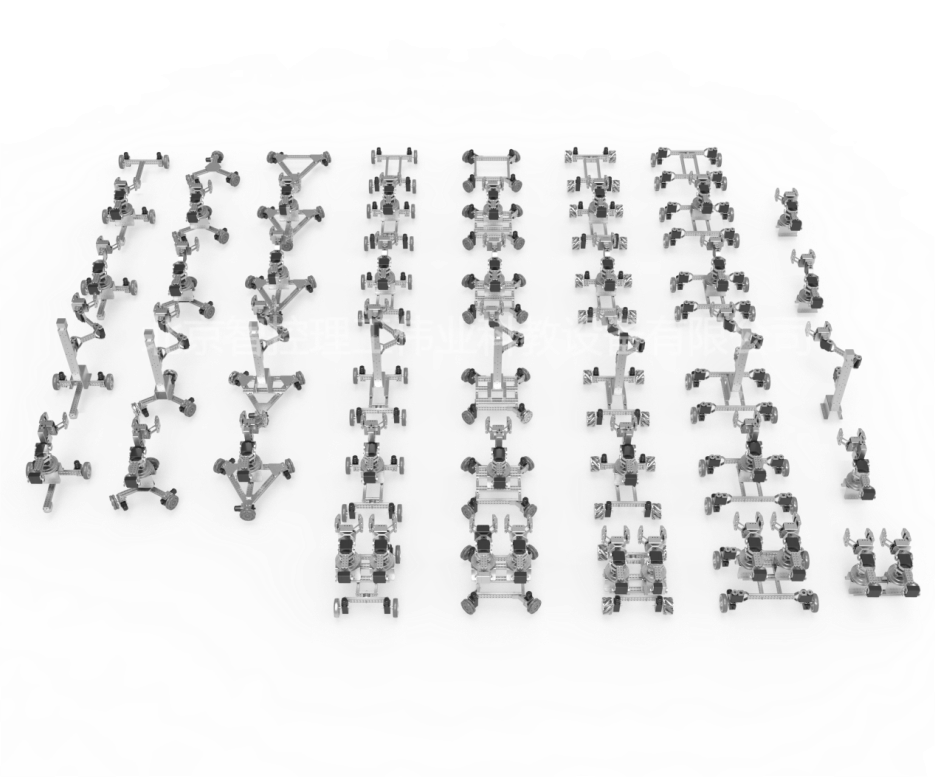
※1.機器人構型:可以完成不少于8種典型底盤、6種典型機械臂、不少于45種典型具身復合機器人。
1.1典型具身底盤 8種:后雙驅四輪差速底盤、雙驅六輪差速底盤、三輪福來輪底盤、四驅四輪差速底盤、四輪福來輪全向底盤、四輪麥輪全向底盤、四驅福麥全向底盤、四驅獨立轉向底盤。
1.2 典型具身機械臂6種:串聯3自由度機械臂、串聯四自由度機械臂、串聯五自由度機械臂、串聯六軸機械臂、Scara機械臂、雙臂。
1.3 典型具身復合機器人48種:雙驅四輪差速云臺復合機器人、雙驅四輪差速四軸復合機器人、雙驅四輪差速五軸復合機器人、雙驅四輪差速六軸復合機器人、雙驅四輪差速Scara復合機器人、雙驅四輪差速雙臂復合機器人、雙驅四輪差速雙臂升降復合機器人、雙驅六輪差速云臺復合機器人、雙驅六輪差速四軸復合機器人、雙驅六輪差速五軸復合機器人、雙驅六輪差速六軸復合機器人、雙驅六輪差速Scara復合機器人、雙驅六輪差速雙臂復合機器人、雙驅六輪差速雙臂升降復合機器人、三輪全向云臺復合機器人、三輪全向四軸復合機器人、三輪全向五軸復合機器人、三輪全向六軸復合機器人、三輪全向Scara復合機器人、三輪全向雙臂復合機器人、三輪全向雙臂升降復合機器人、四驅差速云臺復合機器人、四驅差速四軸復合機器人、四驅差速五軸復合機器人、四驅差速六軸復合機器人、四驅差速Scara復合機器人、四驅差速雙臂復合機器人、四驅差速雙臂升降復合機器人、2種四輪全向云臺復合機器人、2種四輪全向四軸復合機器人、2種四輪全向五軸復合機器人、2種四輪全向六軸復合機器人、2種四輪全向Scara復合機器人、2種四輪全向雙臂復合機器人、四輪轉向云臺復合機器人、四輪轉向四軸復合機器人、四輪轉向Scara復合機器人。
2.機器人零件:包含金屬結構件、機器人執行部件、五金零件。金屬結構件主要材質為航空鋁,表面氧化處理,共不少于100件,包含雙排孔梁型桿150、雙排孔梁型桿90、雙排孔梁型桿50、直流電機模組、擺動模組、夾持器模組、直線運動模組、轉臺模組、角度折彎件等。五金零件為鋼制螺絲、螺母、組裝工具等。
3.機器人電機:不少于共2種10個,包含編碼直流電機*4、標準舵機*7;
3.1編碼直流電機: 霍爾編碼器,減速比30,空載轉速360rpm,供電電壓12V,額定扭矩輸出1Nm,堵轉扭矩4.5Nm;
3.2標準舵機:額定扭矩30kgf.cm;
4.機器人控制器:單片機主板2個,AI嵌入式開發板1個,驅動擴展板2個。
4.1單片機主板:包含STM32和Arduino兩種主板。STM32芯片為stm32f407,32 位微控制器,基于 ARM Cortex-M4 架構,時鐘速度可達 150MHz,具有 512KB 的閃存和 192KB 的 SRAM。Arduino采用32 位 ARM Cortex-M3 處理器,最高時鐘頻率為76 MHz。
4.2 AI嵌入式開發板:搭載 Sunrise 5 智能計算芯片,可提供不少于9 Tops 的算力, 支持 Transformer、RWKV、Occupancy、Stereo Perception 等多種復雜模型和新興算法,預裝Ubuntu系統和ROS系統。
※4.3驅動擴展板:可驅動4路直流電機、6路PWM舵機、4路雙模擬IO傳感器;
4.4軟件:適配Keil5、Arduino IDE、Vscode等常用的IDE環境。需提供在Vscode下基于Arduino框架不少于15個實驗項目的STM32機器人控制實例。提供Ubuntu和ROS系統鏡像文件。
※5.機器人傳感器
超聲波傳感器不少于*3、四路巡線模塊*1、集成視覺攝像頭*1、陀螺儀*1、離線語音模塊*1、激光雷達*1,無畸變200w像素高清攝像頭*·。
6.機器人交互模塊
彩色LE D燈*1、喇叭模塊*1、USB手柄遙控器*1。
7.實驗項目及資源
※7.1實驗項目:主要由具身機器人構型創新設計、感知系統創新設計、場景應用設計三個部分組成。構型創新設計需滿足上述8種典型底盤、6種典型機械臂、45種典型具身復合機器人構型的組裝和設計說明、驅動控制。感知系統創新設計包含機器人避讓、循跡、姿態控制、語音指令控制、視覺循跡、視覺追蹤、人臉檢測;YOLO工程化部署、機械臂視覺搬運、移動機器人導航與定位(Gampping、Hector、Cartographer)等功能。場景應用設計包含倒車入庫、道路無人駕駛、野外無人勘探、電力巡檢等場景。
※7.2資源:提供配套實驗項目的實驗教程、所有構型的三維設計圖文件、所有程序的源碼。
《機械原理》、《傳感器檢測與控制》、《單片機原理及應用》、《機器視覺》、《自動控制原理》、《機器人學》、《機器人操作系統ROS》、《移動機器人導航與定位》等課程開展綜合實踐。
競賽支持:中國高校智能機器人創意大賽、中國大學生工程實踐與創新能力大賽、中國機器人及人工智能大賽等競賽訓練。