



產品分類
- 電工電子電氣實訓設備
- 電力電子電機實訓裝置
- 過程控制實驗裝置
- 工業機器人智能制造
- 維修電工實訓設備
- PLC自動化實訓設備
- 數控機床實訓考核裝置
- 數控機床機械加工設備
- 機床電氣實訓裝置
- 機電一體化實訓設備
- 機械示教陳列柜
- 機械專業實驗設備
- 傳感器檢測實驗室設備
- 工業互聯人工智能實訓設備
- 特種作業操作實訓考核設備
- 物聯網實驗實訓設備
- 消防、給排水實訓設備
- 網絡布線實訓室設備
- 電梯安裝維修實訓考核設備
- 熱工暖通家電制冷實訓設備
- 樓宇智能化實訓設備
- 環境工程實驗裝置
- 流體力學實驗裝置
- 化工專業實驗實訓設備
- 新能源實驗實訓設備
- 電力供配電實訓設備
- 煤礦礦山實驗實訓設備
- 液壓氣動實驗室設備
- 教學仿真軟件
- 軌道交通實驗實訓設備
- 船舶實訓考核裝置
- 駕駛模擬訓練設備
- 新能源汽車實訓設備
- 汽車發動機底盤實訓臺
- 汽車電器電子實訓臺
- 特種車工程機械實訓設備
- 智能網聯汽車實訓設備
- 醫學教學模型
- 中小學實驗室設備
- 實驗箱.實驗儀
- 光電子通信實驗裝置
- 儀器設備.教學掛圖
更多新產品
- LG-DQ04型 電氣自動化技術考核實訓裝置
- LGKL-735D型 通用電工電子實訓設備(電工電子電氣數
- LG-BZH015型 光纜交接箱工程布線光電展示實訓裝置
- LG-BZH014型 數據中心工程布線光電展示實訓裝置
- LG-BZH013型 光纖熔接實訓設備
- LG-BZH012型 全光網綜合布線實訓平臺
- LG-BZH011型 網絡綜合布線故障模擬與檢測實訓裝置
- LG-BZH010型 網絡綜合布線故障模擬與檢測實訓裝置
- LG-BZH09型 光纜配線端接與測試實訓裝置
- LG-BZH08型 光纜配線端接與測試實訓裝置
- LG-BZH07型 銅纜配線端接與測試實訓裝置
- LG-BZH06型 銅纜配線端接與測試實訓裝置
- LG-DST02型 智能制造單元理實一體化平臺
- LGP-LC01型 PLC實驗臺
- LGY-LY020型 運動控制實訓裝置
更多熱點產品
- 汽車透明整車模型、運輸車輛模型
- CLG-104型《電機與變壓器》示教陳列柜(CD解說)
- CLG-109《模具》示教陳列柜(CD解說)
- CLG-107型 機械綜合陳列柜
- CLG-102型 《機械零件》示教陳列柜
- LG-DCC型 機械振打袋式除塵實驗裝置
- LG-MFL01型 超濾微濾膜分離實驗裝置
- LG-NKS型 催化劑顆粒內擴散實驗裝置
- LG-CLDF型 多釜串聯實驗裝置
- LG-YY18C型 氣動與PLC實訓裝置(T型鋁槽單面)
- LG-YY18B型 透明液壓傳動與PLC實訓裝置(T型鋁槽單面
- LG-YYCS01型 液壓傳動與控制綜合測試實驗臺
- LG-DY01B型 電液比例綜合實驗臺
- LG-YYZN01型 智能型液壓綜合實驗臺
- LG-DLK01型 電力系統綜合自動化實驗平臺
LGWL-JT01型 智能交通管理實訓系統
品牌:理工偉業 咨詢電話:010-82827827 82827835
一、系統簡介
LGWL-JT01型 智能交通主題沙盤實訓系統以城市道路交通為原型,綜合運用傳感器采集、設備控制、無線傳感器網絡、射頻識別、圖像識別、嵌入式系統、無線通信等物聯網技術以及多學科技術的交叉融合,依托部署在交通沙盤中的智能小車、傳感器節點、控制節點、工業攝像機、智能網關、服務器與客戶端實現交通燈智能管理、路燈管理、公交優先、超速抓拍、車牌識別、智能停車場、高速ETC、公路災害智能預警、自動避障、車聯網等功能,為解決現代城市交通擁堵、交通事故、違規逃逸、停車難等一系列問題提供了技術路線,也為物聯網專業教學提供了一個完備的應用實訓系統。
LGWL-JT01型 智能交通主題沙盤實訓系統以城市道路交通為原型,綜合運用傳感器采集、設備控制、無線傳感器網絡、射頻識別、圖像識別、嵌入式系統、無線通信等物聯網技術以及多學科技術的交叉融合,依托部署在交通沙盤中的智能小車、傳感器節點、控制節點、工業攝像機、智能網關、服務器與客戶端實現交通燈智能管理、路燈管理、公交優先、超速抓拍、車牌識別、智能停車場、高速ETC、公路災害智能預警、自動避障、車聯網等功能,為解決現代城市交通擁堵、交通事故、違規逃逸、停車難等一系列問題提供了技術路線,也為物聯網專業教學提供了一個完備的應用實訓系統。
二、系統構成
LGWL-JT01型 智能交通主題沙盤實訓系統利用各種傳感器測量城市道路中的參數,結合嵌入式數據庫存儲技術將采樣數據統一保存管理;利用ZigBee無線傳感器網絡統一管理各個節點;利用射頻技術實現車輛的自動識別;利用圖像識別技術實現車牌識別;利用自動控制理論和反饋控制理論實現智能控制;利用嵌入式Linux系統實現智能網關城市交通管理軟件;利用WIFI網絡實現網關與服務器之間的通信,激發用戶了解物聯網技術在城市交通網等現實環境的應用。
1、系統外觀
LGWL-JT01型 智能交通主題沙盤實訓系統外觀如圖所示。
LGWL-JT01型 智能交通主題沙盤實訓系統利用各種傳感器測量城市道路中的參數,結合嵌入式數據庫存儲技術將采樣數據統一保存管理;利用ZigBee無線傳感器網絡統一管理各個節點;利用射頻技術實現車輛的自動識別;利用圖像識別技術實現車牌識別;利用自動控制理論和反饋控制理論實現智能控制;利用嵌入式Linux系統實現智能網關城市交通管理軟件;利用WIFI網絡實現網關與服務器之間的通信,激發用戶了解物聯網技術在城市交通網等現實環境的應用。
1、系統外觀
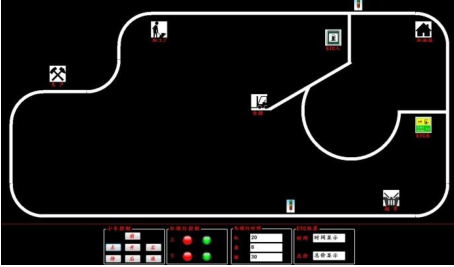
LGWL-JT01型 智能交通主題沙盤實訓系統外觀如圖所示。



智能交通沙盤外觀圖
2、系統構成拓撲圖

系統構成拓撲圖
三、硬件組成
智能交通主題沙盤實訓系統主要由感知設備、控制設備、射頻識別裝置、圖像采集設備、智能小車、智能網關、監控中心、供電設備、鋁合金鋼架模型等組成。
感知設備:
主要由傳感器調理板、ZigBee通信處理板以及接口底板組成的節點。標配傳感器包括光線傳感器、車位狀態檢測傳感器、火焰傳感器等,可根據客戶需求定制不同類型的傳感器節點。它們通過ZigBee技術將采樣數據傳輸給智能網關。
控制設備:
主要由執行設備、ZigBee通信處理板以及接口底板組成的節點,因供電電流不同存在兩種類型的控制設備:直流供電型控制設備、交流供電型控制設備。直流供電設備主要包括車位狀態指示燈、十字路口交通燈、道閘控制器、語音播放器、以及站臺LCD顯示器。交流供電控制設備主要包括控制器和交流電器,控制器封裝在標準的86盒內,交流電器只需插入86盒的兩相或三相插座內即可實現電器的開關控制,如路燈。
射頻識別裝置:
主要由超高頻讀寫器、天線、以及超高頻標簽組成,主要用來實現車輛不停車識別,可通過改變天線射頻功率實現讀寫距離遠近的調節。超高頻讀寫器具有RJ45以太網接口,與智能網關處于同一個局域網內,通過TCP/IP協議與智能網關交互信息。
圖像采集設備:
主要包括模擬攝像頭和IP攝像頭兩種。AV模擬攝像頭安裝在城市交通重要路段,如十字路口、高速路入口、車場出入口等,用于違規抓拍和統計車流量。IP攝像頭是一種視頻服務器,主要用于重點場所的視頻監控。
智能小車:
由核心控制板、ZigBee通信模塊、傳感器采集板、伺服電機、供電板、輪式底盤組成,實現自動循跡、避障、紅燈擇路行駛、前進、后退、左右轉彎、到站停車、以及與智能網關的通信等功能。
智能網關:
主要用于傳感層設備的數據處理以及接入上層云服務平臺。主要由Cortex-A8主板組成,可升級為A9四核主板,整體封裝在模具內,美觀大方。主板集成ZigBee無線路由器通信模塊,用于維護ZigBee網絡,接收ZigBee傳感器采樣信息,向ZigBee控制設備發送控制命令。主板還集成WiFi模塊,用于連接無線路由器,降低以太網布線的復雜度。同時,主板可擴展GPRS、3G或4G模塊,將智能網關接入互聯網,實現信息的遠程可靠傳輸。
監控中心:
普通PC機,通過TCP、UDP協議與智能網關通信,運行智能交通管理軟件。
供電設備:
配有完善的供電設備,包括空氣開關、急停開關、電源指示燈等,安裝在底座鋼架上,為系統輸入安全穩定的交流220V總電源。
鋼架模型:
支撐智能交通的整個設施,內部鋪設供電線路。除了提供標準智能交通模型外,還可根據學校的要求設計智能交通的外觀,交通線路的規劃,感知與控制設備的類型,設備部署的方式等。
四、軟件資源
系統軟件默認采用C/S結構,主要包括智能小車傳感器采集控制軟件、ZigBee無線傳感器網絡數據透明傳輸軟件、智能網關QT智能交通管理軟件、監控終端C#智能交通管理軟件等。
智能小車自動巡航系統軟件:
主要利用STC系列51單片機的接口總線,驅動紅外反射、超聲波等傳感器采集信息,經過處理,驅動直流伺服電機帶動萬向輪轉動,實現小車的自動循跡、避障、行駛方式的改變等功能。同時小車上的閱讀器和天線會自動識別道路上鋪設的射頻卡,實現小車地圖定位。
ZigBee無線傳感器網絡數據透明傳輸軟件:
主要實現ZigBee網絡的建立、節點的自動入網、節點休眠與喚醒、節點之間數據的透明傳輸、傳感器節點的采樣與傳輸、以及執行節點驅動設備的功能。
智能網關QT智能交通管理軟件:
智能網關采用嵌入式Linux操作系統,上電后即運行基于QT的智能交通管理軟件。軟件包括系統設置、交通管理主界面等。用戶可以在本地網關上直接瀏覽智能小車的運行狀態,控制小車的運行方式,瀏覽關鍵路口(高速出入口或停車場出入口)的抓拍圖像,也可手動控制出入口閘機。軟件系統集成了嵌入式數據庫,對所有傳感器數據進行保存。
監控終端C#智能交通管理軟件:
監控中心運行基于C#的智能交通管理軟件,主要實現城市公交與私家車在城市交通圖中的定位等功能。
五、系統功能
智能交通主題沙盤實訓系統主要由感知設備、控制設備、射頻識別裝置、圖像采集設備、智能小車、智能網關、監控中心、供電設備、鋁合金鋼架模型等組成。
感知設備:
主要由傳感器調理板、ZigBee通信處理板以及接口底板組成的節點。標配傳感器包括光線傳感器、車位狀態檢測傳感器、火焰傳感器等,可根據客戶需求定制不同類型的傳感器節點。它們通過ZigBee技術將采樣數據傳輸給智能網關。
控制設備:
主要由執行設備、ZigBee通信處理板以及接口底板組成的節點,因供電電流不同存在兩種類型的控制設備:直流供電型控制設備、交流供電型控制設備。直流供電設備主要包括車位狀態指示燈、十字路口交通燈、道閘控制器、語音播放器、以及站臺LCD顯示器。交流供電控制設備主要包括控制器和交流電器,控制器封裝在標準的86盒內,交流電器只需插入86盒的兩相或三相插座內即可實現電器的開關控制,如路燈。
射頻識別裝置:
主要由超高頻讀寫器、天線、以及超高頻標簽組成,主要用來實現車輛不停車識別,可通過改變天線射頻功率實現讀寫距離遠近的調節。超高頻讀寫器具有RJ45以太網接口,與智能網關處于同一個局域網內,通過TCP/IP協議與智能網關交互信息。
圖像采集設備:
主要包括模擬攝像頭和IP攝像頭兩種。AV模擬攝像頭安裝在城市交通重要路段,如十字路口、高速路入口、車場出入口等,用于違規抓拍和統計車流量。IP攝像頭是一種視頻服務器,主要用于重點場所的視頻監控。
智能小車:
由核心控制板、ZigBee通信模塊、傳感器采集板、伺服電機、供電板、輪式底盤組成,實現自動循跡、避障、紅燈擇路行駛、前進、后退、左右轉彎、到站停車、以及與智能網關的通信等功能。
智能網關:
主要用于傳感層設備的數據處理以及接入上層云服務平臺。主要由Cortex-A8主板組成,可升級為A9四核主板,整體封裝在模具內,美觀大方。主板集成ZigBee無線路由器通信模塊,用于維護ZigBee網絡,接收ZigBee傳感器采樣信息,向ZigBee控制設備發送控制命令。主板還集成WiFi模塊,用于連接無線路由器,降低以太網布線的復雜度。同時,主板可擴展GPRS、3G或4G模塊,將智能網關接入互聯網,實現信息的遠程可靠傳輸。
監控中心:
普通PC機,通過TCP、UDP協議與智能網關通信,運行智能交通管理軟件。
供電設備:
配有完善的供電設備,包括空氣開關、急停開關、電源指示燈等,安裝在底座鋼架上,為系統輸入安全穩定的交流220V總電源。
鋼架模型:
支撐智能交通的整個設施,內部鋪設供電線路。除了提供標準智能交通模型外,還可根據學校的要求設計智能交通的外觀,交通線路的規劃,感知與控制設備的類型,設備部署的方式等。
四、軟件資源
系統軟件默認采用C/S結構,主要包括智能小車傳感器采集控制軟件、ZigBee無線傳感器網絡數據透明傳輸軟件、智能網關QT智能交通管理軟件、監控終端C#智能交通管理軟件等。
智能小車自動巡航系統軟件:
主要利用STC系列51單片機的接口總線,驅動紅外反射、超聲波等傳感器采集信息,經過處理,驅動直流伺服電機帶動萬向輪轉動,實現小車的自動循跡、避障、行駛方式的改變等功能。同時小車上的閱讀器和天線會自動識別道路上鋪設的射頻卡,實現小車地圖定位。
ZigBee無線傳感器網絡數據透明傳輸軟件:
主要實現ZigBee網絡的建立、節點的自動入網、節點休眠與喚醒、節點之間數據的透明傳輸、傳感器節點的采樣與傳輸、以及執行節點驅動設備的功能。
智能網關QT智能交通管理軟件:
智能網關采用嵌入式Linux操作系統,上電后即運行基于QT的智能交通管理軟件。軟件包括系統設置、交通管理主界面等。用戶可以在本地網關上直接瀏覽智能小車的運行狀態,控制小車的運行方式,瀏覽關鍵路口(高速出入口或停車場出入口)的抓拍圖像,也可手動控制出入口閘機。軟件系統集成了嵌入式數據庫,對所有傳感器數據進行保存。
監控終端C#智能交通管理軟件:
監控中心運行基于C#的智能交通管理軟件,主要實現城市公交與私家車在城市交通圖中的定位等功能。
五、系統功能
 |
多車同時行駛
系統支持2個智能小車同時運行,一個模擬城市公交,一個模擬私家車,均可實現自動循跡,避障行駛、前進、后退、左右轉彎等基本功能。 |
 |
公交優先功能
公交車到達十字路口,系統控制交通燈變成綠燈,讓公交車優先通行。 |
 |
交通燈管理
交通燈控制系統是整個智能交通的基礎,主要是對交通十字路口、丁字路口的紅、綠、黃燈的有效控制,使某一方向的車輛遇到紅燈停止,另一方向的車輛綠燈順利通過,整個交通系統按照交通規則運行,保證道路交通的安全和暢通。 |
 |
路燈管理
系統根據光線傳感器采集的光亮度值自動控制路燈的打開和關閉。當光亮度值低于某一個閾值時,即打開路燈,當光亮度值高于某一個閾值時,關閉路燈,達到節能的目的。 |
 |
圖像抓拍
對出入停車場、高速公路的車輛進行抓拍備案; 也可對違反交通規則(如闖紅燈)的車輛進行抓拍。 |
 |
ETC不停車收費系統
系統模擬高速公路出入口的ETC收費站,收費站安裝有射頻讀卡器,當車輛進入ETC入口處射頻讀寫器的感應范圍時,讀卡器讀出車輛信息,對車輛抓拍,所有信息存入數據庫,開啟閘機。當車輛進入ETC出口射頻讀寫器感應范圍時,讀卡器識別出車輛信息,計算路費,打開閘機,讓車輛駛出高速公路。 |
 |
災害預警系統
系統提供道路交通周邊環境如高速公路森林著火、山體滑坡等的動態監測。當災害發生時,火焰或超聲波傳感器探測到后,將信息發送給網關,網關通過無線通信立即播放災害信息,沿路交通指示牌上顯示災害信息,同時將災害信息無線發送給每個車輛,車輛收到后,選擇其他安全路段行駛或掉頭返回。 |
 |
車聯網系統
當網關開啟車聯網模式后,小車后避障模式啟動。前面車輛如果被后面的車輛所追趕,則自動加速。 當前車遇到山體滑坡,山石擋住公路時,便將該信息通過無線網絡發送給網關,由網關再發送給其他車輛,及時擇路繞行。 |
 |
車位的智能管理
每個車位檢測器具有一個唯一的mac地址,用來識別車位。車位檢測器實時檢測車位占用狀況,將數據傳輸給網關管理軟件,以圖形方式顯示在GUI界面上。同時智能終端管理軟件上的車位狀態也會根據網關的狀態進行更新,方便停車人員實時查看。 |
 |
用戶預定車位
用戶可以在智能交通管理界面上預定車位,預定后,車輛自動駛入指定車位停車。 |
六、教學資源
智能交通管理實訓系統覆蓋了智能車采集控制、ZigBee無線傳感器網絡、Linux智能網關、以及PC機監控終端三部分,因此系統提供了約三十個課時的實驗,從基礎采集傳輸實驗,到網關匯聚分析處理實驗,再到PC機監控終端應用實驗,一條線貫穿,讓學生在實驗中逐步領悟物聯網的體系結構,關鍵技術以及實現方式,培養學生動手解決問題的能力,激發學生的創新潛力。
另外,為方便用戶教學和學習,系統提供了一本使用手冊和一本實驗指導書。使用手冊主要介紹如何安全正確地操作這套系統,使其正常運轉,實現智能交通的各項功能。實驗指導書詳細地介紹了系統的網絡結構,網絡參數,實驗目的,實驗原理,以及實驗步驟等。
1、基礎實驗能力
智能交通管理實訓系統覆蓋了智能車采集控制、ZigBee無線傳感器網絡、Linux智能網關、以及PC機監控終端三部分,因此系統提供了約三十個課時的實驗,從基礎采集傳輸實驗,到網關匯聚分析處理實驗,再到PC機監控終端應用實驗,一條線貫穿,讓學生在實驗中逐步領悟物聯網的體系結構,關鍵技術以及實現方式,培養學生動手解決問題的能力,激發學生的創新潛力。
另外,為方便用戶教學和學習,系統提供了一本使用手冊和一本實驗指導書。使用手冊主要介紹如何安全正確地操作這套系統,使其正常運轉,實現智能交通的各項功能。實驗指導書詳細地介紹了系統的網絡結構,網絡參數,實驗目的,實驗原理,以及實驗步驟等。
1、基礎實驗能力
|
名稱
|
實驗
|
|
1.智能小車采集控制實驗
|
Keil uvision開發環境搭建實驗
智能小車紅外反射傳感器采樣實驗 智能小車超聲波傳感器采樣實驗 智能小車直流伺服電機控制實驗 智能小車避障行駛實驗 |
|
1. 無線傳感器網絡通信類實驗
|
IAR集成開發環境搭建實驗
基于Z-Stack協議棧傳感節點透明傳輸程序的使用實驗 |
|
2. Linux智能網關實驗
|
Qt開發環境搭建實驗
基于Qt的智能小車壁障實驗 基于Qt的智能小車自動循跡實驗 基于Qt的車載讀卡器讀卡實驗 基于Qt的閘機控制實驗 基于Qt模擬加油實驗 基于Qt點陣屏控制實驗 基于Qt交通燈控制實驗 基于Qt公交報站實驗 基于Qt道路擁堵實驗 基于Qt森林火災預警實驗 |
|
3. PC機監控終端實驗
|
PC機與網關的TCP通信實驗
PC機與網關的UDP通信實驗 |
2、創新實驗能力
|
名稱
|
實驗
|
|
1. 基于QT的智能網關創新實驗
|
基于Qt的車聯網通信實驗
基于Qt的車載讀卡器讀卡實驗 基于Qt的指定停車位停車實驗 基于Qt的智能交通綜合管理實驗 |
|
2. 基于C#的PC機監控終端創新實驗
|
基于C#的車輛定位實驗
基于C#的設備控制實驗 |
3、科研實驗能力
除了上述傳感控制設備、智能網關與智能終端的相關實驗外,系統還提供了開發類實驗。
除了上述傳感控制設備、智能網關與智能終端的相關實驗外,系統還提供了開發類實驗。
|
名稱
|
實驗
|
|
1.無線傳感器網絡開發實驗
|
簡單的無線收發實驗;誤碼率測試實驗;頻譜分析實驗;
Z-Stack 點對點通訊實驗;Z-Stack 星狀網通訊實驗; Z-Stack 樹狀網通訊實驗;Z-Stack MESH網通訊實驗; Z-Stack ZigBee PRO通訊實驗; 基于Z-Stack2007協議棧的GenericApp實例的移植實驗 基于Z-Stack2007協議棧的無線數據傳輸實驗; 基于Z-Stack2007協議棧溫濕度節點與協調器的無線數據傳輸; 基于Z-Stack2007協議棧多傳感器節點與協調器無線數據傳輸; 基于Z-Stack2007協議棧的網絡拓撲定制實驗; |
|
2.智能網關開發實驗
|
嵌入式Linux開發環境建立實驗:
Uboot啟動代碼配置編譯實驗;Linux內核配置編譯實驗; Linux內核驅動開發實驗;Linux驅動接口測試實驗; Yaffs根文件系統的制作實驗;Qtopia2.2.0圖形系統編譯實驗; Qt-4.7.3程序庫的編譯實驗 |